- TI nspire
TI-nspire 배터리가 충전되지 않을 때
-

- 2024.10.24 - 11:36 2024.10.24 - 10:37 4401 3

1) 배터리가 아닌 외부 전원을 연결했을 때는 정상적으로 계산이 되어야 합니다.
2) 5시간~10시간 정도를 충전하더라도, 배터리 상태가 0%에서 변동이 없어야 합니다.
3) 이 상태에서 외부 전원(케이블)을 제거하면 바로 꺼져야 합니다.
공식 문크
https://education.ti.com/en/customer-support/knowledge-base/ti-nspire-family/troubleshooting-messages-unexpected-results/30732
영문 번역 + 수정
Solution 30732: TI-Nspire™ CX 계산기가 충전되지 않는 문제 해결
TI-Nspire CX 핸드헬드가 충전되지 않을 때 어떻게 해야 하나요?
TI-Nspire CX 핸드헬드가 충전되지 않을 경우 다음을 확인하세요:
* 적당한 전압과 전류가 공급되지 않을 때 충전이 되지 않습니다.
1) 벽 충전기를 사용하는 경우, 계산기와 함께 제공된 TI 벽 충전기나 최소 1암페어(일반적으로 “1A” 또는 “1000mA”로 표시됨)로 인증된 UL 인증 USB 충전기를 사용하고 있는지 확인하세요.
충전기가 UL 인증인지 확인하려면 충전기를 뒤집어 내부 라벨을 확인하세요. UL 스탬프를 찾고, 1000mA 이상임을 확인하세요.
: 외국의 경우 인증 마크가 달라서 UL 이지만, 우리나라는 KC 마크입니다. KC든 UL이든 CE 든 아무거라도 붙어 있는지 확인하세요. 하라니까 해보죠 뭐...
: 하나의 충전기로만 테스트하지 마시고 다양한 전원 공급원으로 테스트해 보세요. 잠깐 꼽는 것은 효과가 있는지 없는지 알 수 없으니, 번갈아가며 1~2시간정도 꼽아두시면 살아날 수 있습니다.
* 접촉불량일 때 충전이 되지 않을 수 있습니다.
2) USB 케이블이 TI-Nspire CX 핸드헬드에 완전히 연결되어 있는지 확인하고, 단단하게 연결되었는지 확인하세요. 완전히 연결되지 않으면 충전되지 않습니다.
3) 핸드헬드 뒤쪽의 리셋 버튼이 눌려 있지 않은지 확인하세요. 만약 눌려 있다면,
종이 클립과 같은 단단한 물체로 버튼이 더 이상 눌려 있지 않도록 하세요.
연필처럼 잔여물을 남길 수 있는 물체는 사용하지 않도록 주의하세요.
: 리셋버튼이 눌려있을 수도 있는지는 모르겠지만, 여튼 확인하라는군요.
4) 슬라이딩 도어 커버 아래쪽에 있는 핸드헬드 뒷면의 접점을 부드럽게 연필 지우개 또는 깨끗한 천과 알코올로 닦아주세요.
: 슬라이딩 도어라는 것은 (계산기 후면 아래에 있는) 크래들에 연결하는 부분을 말하는 것인데,
이곳은 우리나라에선 쓸 일이 없어서 부식이나 접촉불량 날 일이 없지만, 한번 체크 해 보세요.
* 배터리가 기기에 연결이 잘 안된 경우 충전되지 않을 수 있습니다.
5) 핸드헬드 뒷면의 배터리 덮개를 제거하고, TI 충전식 배터리를 분리한 후 다시 연결하세요.
커넥터가 완전히 연결되어 있는지, 배터리 덮개에 의해 전선이 끼이거나 눌리지 않았는지 확인하세요.
: 실수로 배터리를 뺐다가 안끼워놓은 경우도 확인할 수 있겠죠.
6) 충전된 다른 TI-Nspire 충전식 배터리에 접근할 수 있는 경우, 해당 배터리를 장착하고 핸드헬드의 운영 체제를 업데이트하세요.
운영 체제 업데이트 방법은 지식 기반 문서 #21390에서 확인할 수 있습니다.
: 간혹 업데이트로 해결했다는 분이 계시긴 합니다.
PC로 업데이트를 해도 동일한 해결방법이긴 한데, 충전이 안되는 상황이라 업데이트 중 전원이 불안정해서 벽돌이 될 수도 있기에 위험을 감수해야 합니다.
만약 이 방법들이 문제를 해결하지 못한다면, 서비스에 관한 정보를 위해 TI-Cares에 문의하세요.
: 우리나라라면 TI-plaza (한국카이시스템)에 문의하셔야겠죠. https://www.tiplaza.co.kr/html/mainm.html
: 문의해 봐야 위의 방법들을 벗어나지 않습니다.
-
25
댓글3
-
세상의모든계산기
배터리 유무에 따른 상태 표시 차이
1) 부팅시
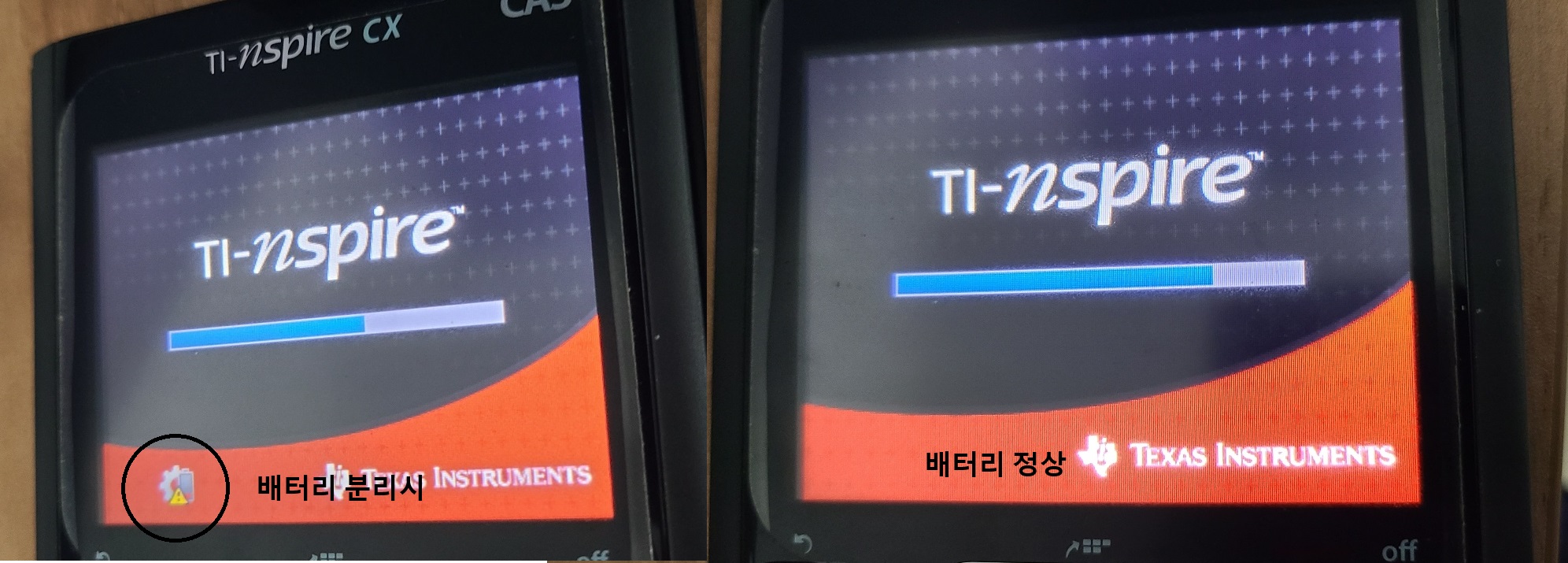
배터리 분리하고 전원 케이블 연결해서 부팅하면 부팅 중에 저런 마크가 생깁니다.
2) 부팅 후
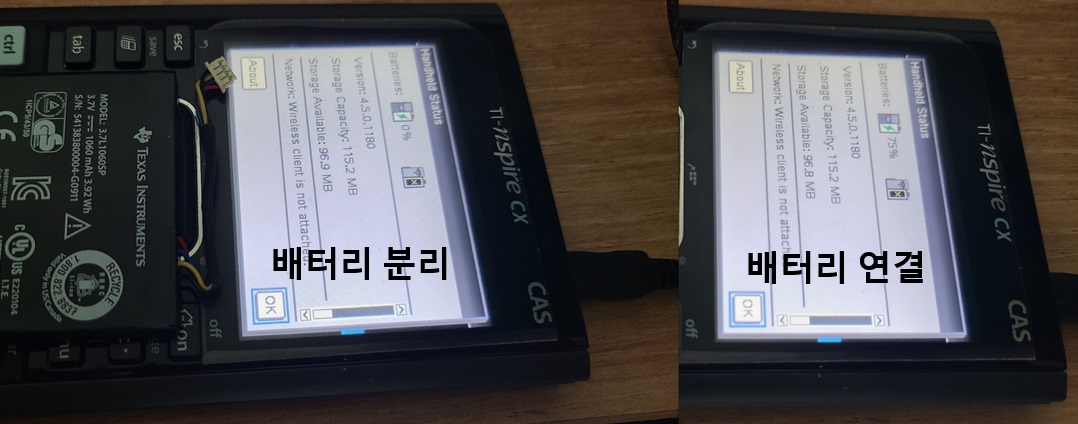
배터리를 분리하더라도 배터리에 번개마크도 뜨고, 0% 표시도 뜹니다.
-
세상의모든계산기
정리하면...
1) 후면 배터리 커버를 열고, 배터리 상태를 체크
- 배터리가 부풀지는 않았는지?
- (배터리) 접촉단자 -- 핀(계산기) 에 이물질은 없는지?
- 구형 모델로 케이블 -- 커넥터 형인 경우 케이블이 끊어졌다거나 눌리지 않았는지?
2) 배터리 연결 상태가 정상이라면
- 전원 USB 케이블로 전원을 공급해 충전 시도.
- 다양한 전원으로 시도.
- 여러 차례 시도 (각 시도간 1분 이상 cooltime 둘 것)
- 이후에 가장 신뢰되는 전원을 이용해 장시간 충전.
ㄴ 그래도 안되면 다른 전원으로 반복 시도.
3) 다 실패할 경우 방법 없으니 TI Plaza 에 문의해 배터리 구매(33,000원)하거나,
호환 배터리 구매해 사용.
세상의모든계산기 님의 최근 댓글
- claude AI는 l-c*r^2 을 1-c*r^2 으로 잘못 읽고 표시하고 있습니다. - TI-nspire CAS 계산기에 l-c*r^2 ≥0 을 조건에 추가해 계산해 보아도 결과는 바뀌지 않습니다. 2026 07.20 ⚠️ 경고가 바로 두 번째 방법이 "성공"한 이유와 정확히 연결되어 있습니다. 경고의 의미 "Domain of the result might be larger than the domain of the input"는 CAS가 절댓값(모듈러스)을 계산하는 과정에서 원래 식보다 정의역이 더 넓은 형태로 단순화했다는 뜻입니다. 구체적으로 이 계산은 내부적으로 대략 이런 과정을 거칩니다. $$\left|\frac{er}{e\cdot r}\right| = \sqrt{\left(\frac{er}{e\cdot r}\right)\cdot\overline{\left(\frac{er}{e\cdot r}\right)}}$$ 즉 원래 식(복소수)과 그 켤레복소수를 곱해서 실수부·허수부 제곱합을 만들고, 거기에 다시 제곱근을 씌우는 과정입니다. 이 과정에서 √(x²) → x 또는 √a·√b → √(ab) 같은 규칙들이 쓰이는데, 이런 규칙들은 x가 실수이고 0 이상일 때만 엄밀하게 성립합니다. CAS는 이 조건들을 일일이 다 추적하지 않고 넘어가면서, 원래는 (e≠0, r+l·ω·i ≠ 0 등) 복소수 특유의 좁은 정의역을 가진 식을, r, l, ω가 어떤 실수여도(부호 무관하게) 정의되는 1/√(r²+l²·ω²)라는 더 넓은 정의역의 식으로 바꿔버린 것입니다. CAS는 이 손실을 감지하고 경고를 띄운 것입니다. 이게 왜 조건 대입 성공과 연결되는가 정리하면, 이 경고는 사실상 이런 뜻입니다. "나는 이 결과를 만들면서 원래 식이 가지고 있던 정의역 제약 정보(부호 조건, i 관련 조건 등)를 이미 버렸다." 바로 이 "정의역 정보를 버린" 상태가 이후 con_1 대입을 매끄럽게 만드는 원인입니다. 첫 번째 시도에서는 i가 살아있는 원래 식에 조건을 대입했기 때문에, CAS가 √(1-c·r²)이 실수인지(정의역 조건: 1-c·r² ≥ 0) 계속 추적하려고 했고, 그 정보가 con에 없어서 더 이상 정리를 못 하고 멈췄습니다. 두 번째 시도에서는 절댓값 계산 단계에서 이미 그런 세밀한 정의역 추적을 CAS 스스로 포기(단순화)했기 때문에, 이후 ω에 무리식을 대입해도 "이게 실수가 맞나?" 하는 검증 절차 없이 그냥 대수적으로 치환·정리해 버립니다. 그래서 깔끔하게 √c/√l이 나온 겁니다. 한 줄 요약 절댓값 계산 시 뜬 "정의역이 넓어졌을 수 있다"는 경고는, CAS가 그 순간에 원래 식의 엄밀한 조건(정의역)을 놓쳤다는 신호이고, 바로 그 "조건을 놓친 상태"이기 때문에 뒤에 이어지는 조건식 대입이 막힘없이 진행된 것입니다. 다만 그 대가로, 결과인 1/√(r²+l²·ω²)이나 최종 √c/√l이 원래 회로 조건(i≠0이 되는 경계, 분모가 0이 되는 경우 등)에서는 엄밀히 성립하지 않을 수 있다는 점은 감안하셔야 합니다. 실제 물리적으로는 r, l, c > 0이고 결과도 물리적으로 타당한 형태라 문제없어 보이지만, 수학적 엄밀성 측면에서는 "정의역이 넓어진 근사적 결과"라는 꼬리표가 붙어있는 셈입니다. 2026 07.20 Claude AI 답변 TI-Nspire CAS의 | (such that / 조건대입) 연산자는 대입 시점의 수식 형태를 그대로 두고 기호만 치환하는 연산입니다. 대입 후에 처음부터 다시 "실수부/허수부 분리, 유리화" 같은 재간소화를 자동으로 수행하지 않습니다. 이 차이가 지금 보신 결과 차이의 핵심입니다. 첫 번째 경우 (|er/(e·r)| | con_1 and con → 실패) 이 시점의 식은 아직 r + l·ω·i 형태의 복소수 그대로입니다 (i가 살아있음). 여기에 con_1: ω = √(1-c·r²)/(√c·l)을 대입하면, 분모 안에 i · √(1-c·r²) 라는 항이 새로 생깁니다. 문제는 CAS가 √(1-c·r²)이 실수인지(즉 1-c·r² ≥ 0인지) 판단할 근거가 없다는 겁니다. 저장해 두신 con 조건은 c>0, l>0, r>0뿐이고, 1-c·r²≥0이라는 조건은 포함되어 있지 않습니다. 그래서 CAS는 i와 이 무리식을 더 정리(유리화, 실수부·허수부 재결합)하지 못하고 있는 그대로 남겨둡니다. 결과에 여전히 i가 보이는 이유입니다. 두 번째 경우 (결과값 1/√(r²+l²·ω²)에 대입 → 성공) |er/(e·r)| (절댓값/모듈러스) 연산은 그 자체로 이미 "복소수 → 실수" 변환을 완료한 결과입니다. 즉 1/√(r²+l²·ω²)에는 더 이상 i가 없고, 순수하게 r, l, ω로만 이루어진 실수식입니다. 이 식에 ω = con_1을 대입하는 것은 그냥 실수 대수식에 실수 대입하는 것이므로, i와 무리식이 뒤엉키는 문제 자체가 발생하지 않습니다. 그래서 바로 깔끔하게 √c/√l로 정리됩니다. 정리하면 절댓값(모듈러스) 계산은 "이 값들이 실수다"라는 가정을 이미 내부적으로 써서 i를 제거하는 연산입니다. 그 연산을 조건 대입 이전에 해두면, 이후 대입은 단순 실수 대입이라 문제없이 정리됩니다. 반대로 i가 남아있는 식에 무리식을 포함한 조건을 먼저 대입하면, 그 무리식의 실수성/부호에 대한 가정이 없어서 CAS가 i를 소거하는 재간소화를 못 하고 멈춰버립니다. 실용적 팁: 복소식에 조건을 대입해야 할 때는 가능하면 절댓값·실수화(유리화) 등을 먼저 끝내서 i를 없앤 뒤 조건을 대입하거나, 대입 후 결과에 다시 simplify/expand/combine 같은 명령을 한 번 더 걸어주면 (필요한 도메인 조건과 함께) 정리가 되는 경우가 많습니다. 2026 07.19 저도 어림잡아 추측할 뿐이지 정확한 이유를 알지는 못합니다. 질문하신 사진을 그대로 (Gemini 3.5 Flash / ChatGPT / Claude Sonnet 5) AI에 넣어 보니 claude AI 가 제일 합리적인 답변을 주어서 이를 붙여 넣습니다. 2026 07.19 아 그렇네요. 감사합니다. ^^ 2026 04.28