선박의 아웃리거에 의한 선박 안정성(요동 감쇄)
-

- 2024.10.20 - 01:41 2024.10.20 - 01:25 694 2
Reduction Of Outrigger Wide To Maximize Fishing Boat ...

https://iptek.its.ac.id › article › download › pdf_266
2024. 8. 5. — Moreover, broader outriggers can amplify vessel motion, leading to extended oscillation periods, ... of the boat with and without the use ...
1. 연구 배경:
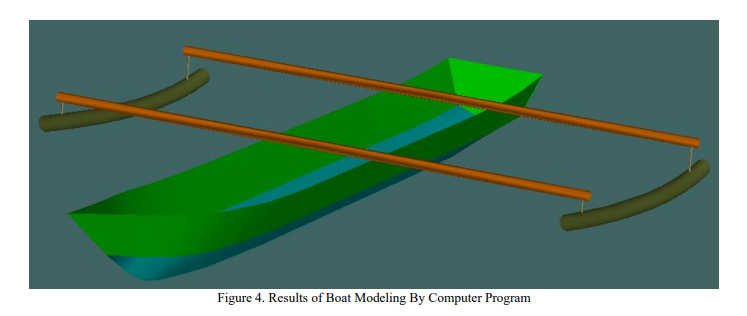
- 프리기 지역의 주깅(Jukung) 어선들은 넓은 아웃리거(약 5미터) 때문에 해안 가까이 정박하기 어려운 문제가 있습니다.
2. 연구 목적:
- 아웃리거 폭을 줄여 PPN 프리기 항구의 정박 용량을 늘리면서도 선박 안정성을 유지하는 방법을 찾고자 합니다.
3. 연구 방법:
- 다양한 아웃리거 폭(1.5m, 1.25m, 1m, 0.75m)에 대해 선박 안정성을 분석했습니다.
- HSC 2000 Annex 7과 Annex 749 (18) Ch3 설계 기준을 사용했습니다.
4. 주요 결과:
- 아웃리거 폭을 1미터로 줄여도 선박 안정성 기준을 충족합니다.
- 이 변경으로 15미터 정박지에서 정박 효율을 66% 높일 수 있습니다.
- PPN 프리기 동쪽 부두의 주깅 선박 수용량이 142척에서 236척으로 증가합니다.
5. 결론:
- 아웃리거 폭을 줄이면 항구 인프라를 최적화하고 프리기 어업 공동체의 운영 효율성을 향상시킬 수 있습니다.
이 연구는 전통적인 어선 설계를 현대화하여 항구 용량과 효율성을 개선하는 방법을 제시하고 있습니다.
-
25
댓글2
-
세상의모든계산기
클로드 Sonnet 3.5에게 수치적으로 분석해 달라고 했습니다.
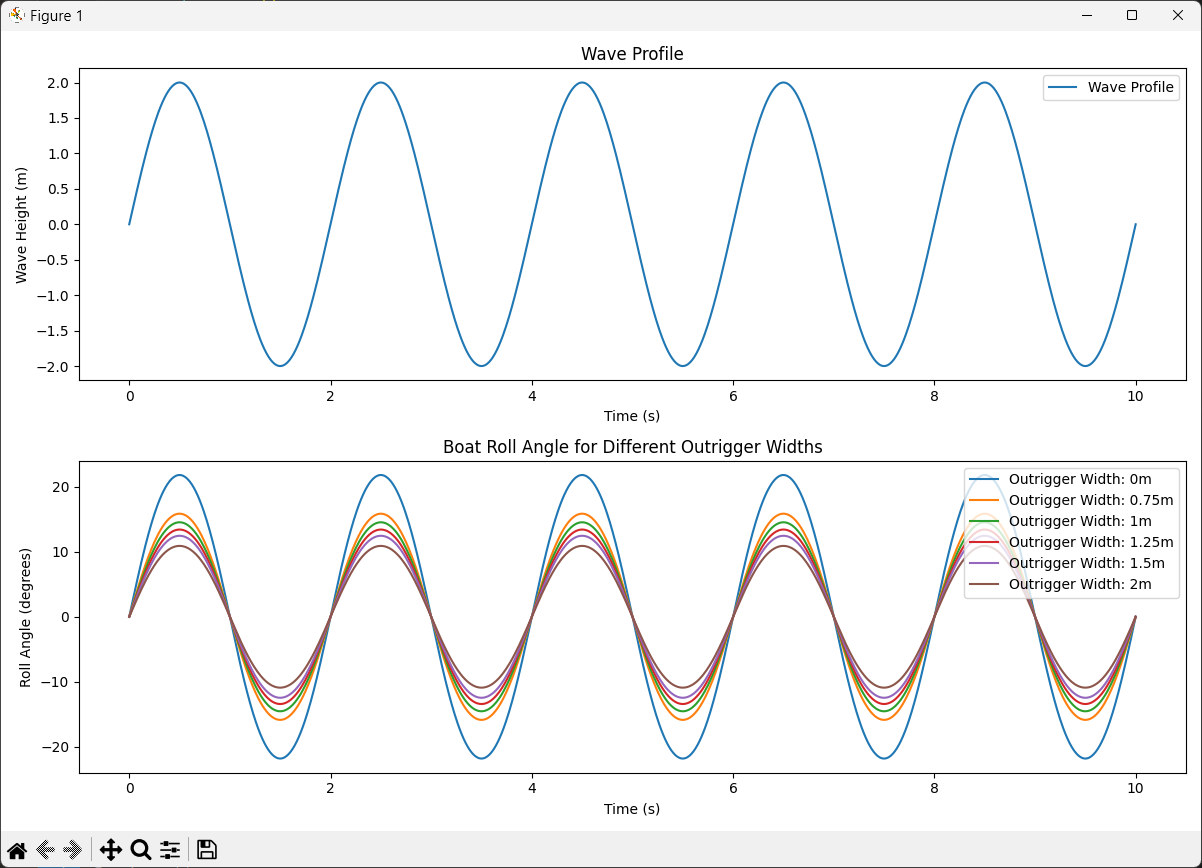
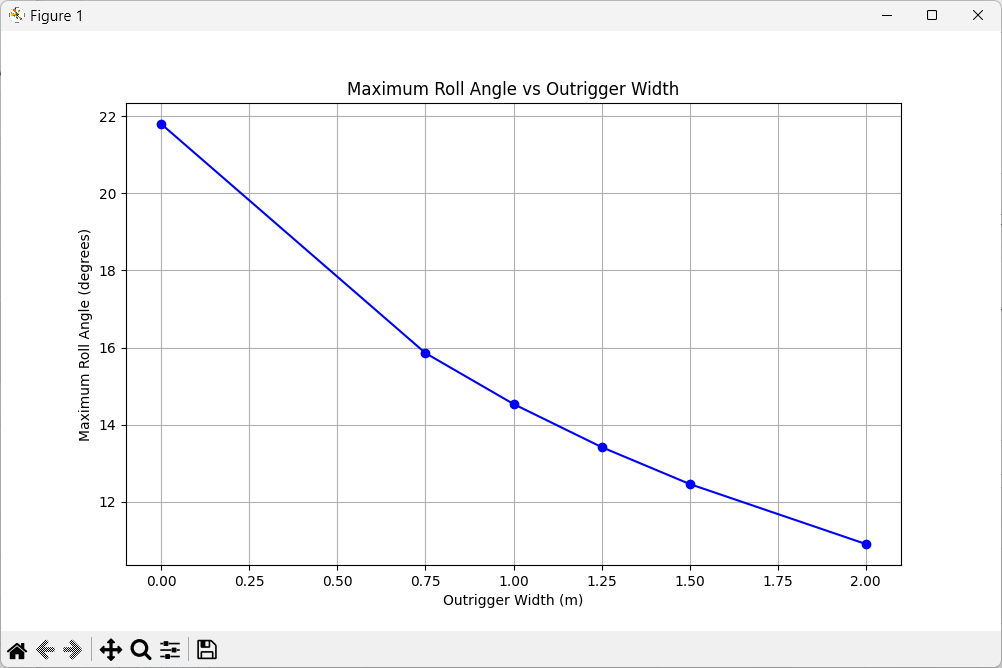
import numpy as np import matplotlib.pyplot as plt from scipy.signal import find_peaks # 파도 프로파일 생성 함수 def generate_wave_profile(time, amplitude, frequency): return amplitude * np.sin(2 * np.pi * frequency * time) # 선박 요동 각도 계산 함수 def calculate_boat_angle(wave_height, outrigger_width): base_angle = np.arctan(wave_height / 5) # 기본 각도 (아웃리거 없을 때) if outrigger_width == 0: return np.degrees(base_angle) else: return np.degrees(base_angle / (1 + outrigger_width * 0.5)) # 아웃리거 효과 # 파라미터 설정 time = np.linspace(0, 10, 1000) # 10초 동안 1000개 데이터 포인트 wave_amplitude = 2 # 파도 진폭 (미터) wave_frequency = 0.5 # 파도 주파수 (Hz) # 파도 프로파일 생성 wave_profile = generate_wave_profile(time, wave_amplitude, wave_frequency) # 아웃리거 폭 범위 설정 outrigger_widths = [0, 0.75, 1, 1.25, 1.5, 2] # 그래프 설정 plt.figure(figsize=(12, 8)) # 파도 프로파일 플롯 plt.subplot(2, 1, 1) plt.plot(time, wave_profile, label='Wave Profile') plt.title('Wave Profile') plt.xlabel('Time (s)') plt.ylabel('Wave Height (m)') plt.legend() # 선박 요동 각도 플롯 plt.subplot(2, 1, 2) for width in outrigger_widths: boat_angles = [calculate_boat_angle(h, width) for h in wave_profile] plt.plot(time, boat_angles, label=f'Outrigger Width: {width}m') plt.title('Boat Roll Angle for Different Outrigger Widths') plt.xlabel('Time (s)') plt.ylabel('Roll Angle (degrees)') plt.legend() plt.tight_layout() plt.show() # 최대 요동 각도 분석 max_angles = [] for width in outrigger_widths: boat_angles = [calculate_boat_angle(h, width) for h in wave_profile] peaks, _ = find_peaks(boat_angles) max_angle = np.mean(np.array(boat_angles)[peaks]) max_angles.append(max_angle) # 최대 요동 각도 플롯 plt.figure(figsize=(10, 6)) plt.plot(outrigger_widths, max_angles, 'bo-') plt.title('Maximum Roll Angle vs Outrigger Width') plt.xlabel('Outrigger Width (m)') plt.ylabel('Maximum Roll Angle (degrees)') plt.grid(True) plt.show() # 결과 출력 for width, max_angle in zip(outrigger_widths, max_angles): print(f"Outrigger Width: {width}m, Max Roll Angle: {max_angle:.2f} degrees")인공지능 정말 똑똑하네요.
인공지능은 아직 개발 초기단계라는거...
세상의모든계산기 님의 최근 댓글
일반 계산기는 일반적으로 세팅이나 리셋기능이 따로 없기 때문에, 다른 요인에 영향을 받을 가능성은 없어 보이구요. '원래는 잘 되었는데, 지금은 설정 값이 날아간다'면 메모리 값을 유지할만큼 배터리가 꾸준하게 공급되지 않기 때문일 가능성이 높다고 봐야겠습니다. - 태양광이 있을 때는 계산은 가능하지만, 서랍등에 넣으면 배터리가 없어서 리셋 https://blog.naver.com/potatoyamyam/223053309120 (교체 사진 참조) 1. 배터리 준비: * 다이소 등에서 LR54 (LR1130) 배터리를 구매합니다. (보통 4개 들이 1,000원에 판매됩니다. LR44와 높이가 다르니 혼동하시면 안됩니다.) 2. 준비물: * 작은 십자드라이버 (계산기 뒷면 나사용. 이것도 없으시면 다이소에서...) 3. 커버 분해: * 계산기 뒷면의 나사를 풀고, 머리 부분(윗부분)의 커버를 조심스럽게 분해합니다. (참고해주신 블로그 사진을 보시면 이해가 빠르실 겁니다.) 4. 배터리 교체: * 기존 배터리를 빼냅니다. * 새 LR54 배터리의 '+'극 방향을 정확히 확인하여 제자리에 넣어줍니다. (대부분의 경우 '+'극이 위로 보이도록 넣습니다.) 5. 조립: * 커버를 다시 닫고 나사를 조여줍니다. * 블로그 사진을 보니 배터리 연결선 등이 눌려서 씹혀 있네요. 원래 씹히도록 설계를 안하는데, 원래 그렇게 만들어 놓은 건지? 모르겠네요. 여튼 씹히면 단선될 가능성이 있으니, 잘 보시고 플라스틱 틈새 등으로 적절히 배치해서 안씹히게 하는 것이 좋습니다. 6. TAX 재설정: * 계산기의 전원을 켜고 TAX 요율을 10%로 다시 설정합니다. 2025 12.10 TI-nspire 입력 방법 solve({x+a+b=5,x)|a=1 and b=2 2025 12.01 질문하실 때는 항상 계산기 모델명을 정확하게 적으셔야 합니다. 2025 12.01 참고 - [공학용 계산기] 로그의 입력 (log, ln) (feat. 밑 입력이 안되는 계산기는?) https://allcalc.org/14995 2025 11.14 HP-39gII 에 ExistOS 설치하기 https://allcalc.org/38526 2025 11.07