선박의 아웃리거에 의한 선박 안정성(요동 감쇄)
-

- 2024.10.20 - 01:41 2024.10.20 - 01:25 2649 2
Reduction Of Outrigger Wide To Maximize Fishing Boat ...

https://iptek.its.ac.id › article › download › pdf_266
2024. 8. 5. — Moreover, broader outriggers can amplify vessel motion, leading to extended oscillation periods, ... of the boat with and without the use ...
1. 연구 배경:
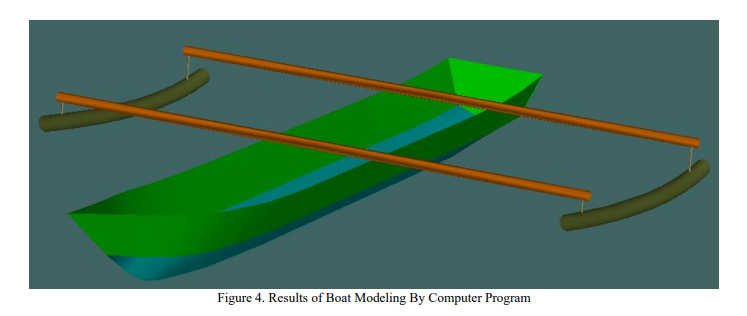
- 프리기 지역의 주깅(Jukung) 어선들은 넓은 아웃리거(약 5미터) 때문에 해안 가까이 정박하기 어려운 문제가 있습니다.
2. 연구 목적:
- 아웃리거 폭을 줄여 PPN 프리기 항구의 정박 용량을 늘리면서도 선박 안정성을 유지하는 방법을 찾고자 합니다.
3. 연구 방법:
- 다양한 아웃리거 폭(1.5m, 1.25m, 1m, 0.75m)에 대해 선박 안정성을 분석했습니다.
- HSC 2000 Annex 7과 Annex 749 (18) Ch3 설계 기준을 사용했습니다.
4. 주요 결과:
- 아웃리거 폭을 1미터로 줄여도 선박 안정성 기준을 충족합니다.
- 이 변경으로 15미터 정박지에서 정박 효율을 66% 높일 수 있습니다.
- PPN 프리기 동쪽 부두의 주깅 선박 수용량이 142척에서 236척으로 증가합니다.
5. 결론:
- 아웃리거 폭을 줄이면 항구 인프라를 최적화하고 프리기 어업 공동체의 운영 효율성을 향상시킬 수 있습니다.
이 연구는 전통적인 어선 설계를 현대화하여 항구 용량과 효율성을 개선하는 방법을 제시하고 있습니다.
-
25
댓글2
-
세상의모든계산기
클로드 Sonnet 3.5에게 수치적으로 분석해 달라고 했습니다.
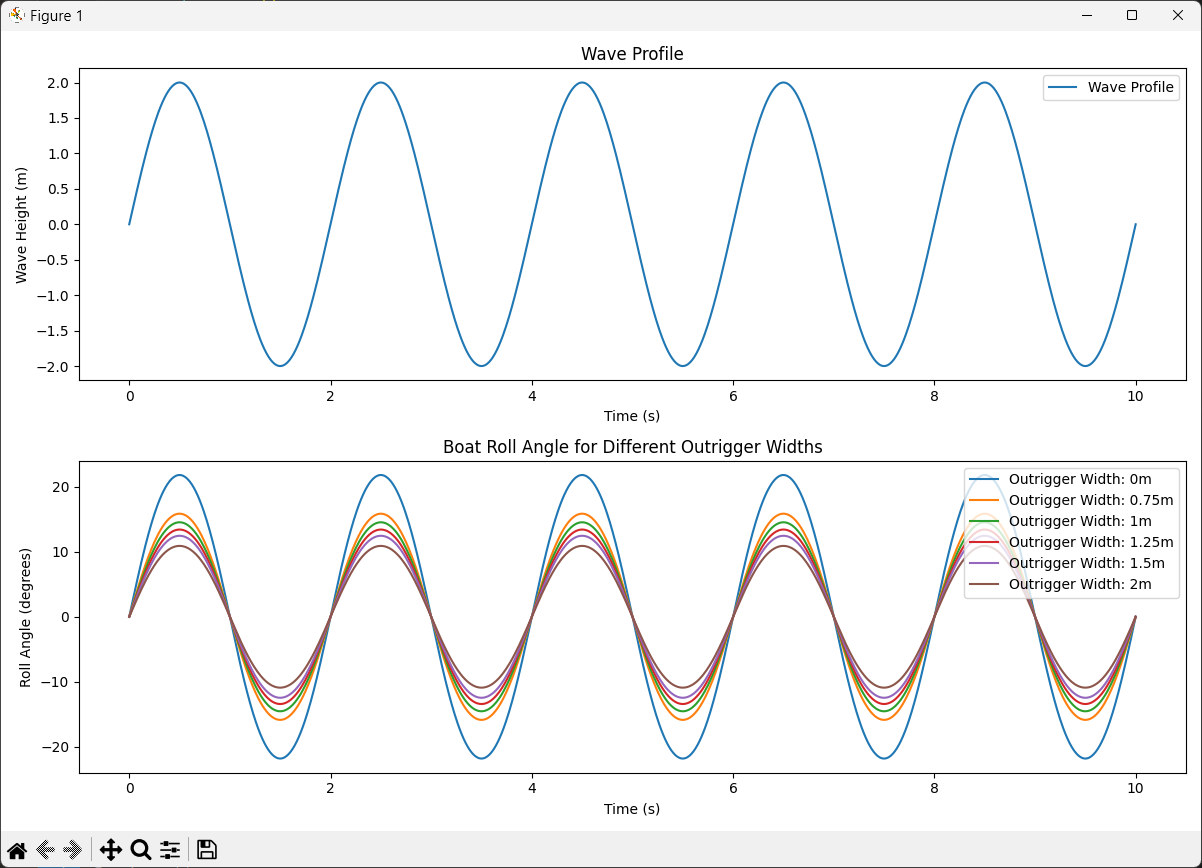
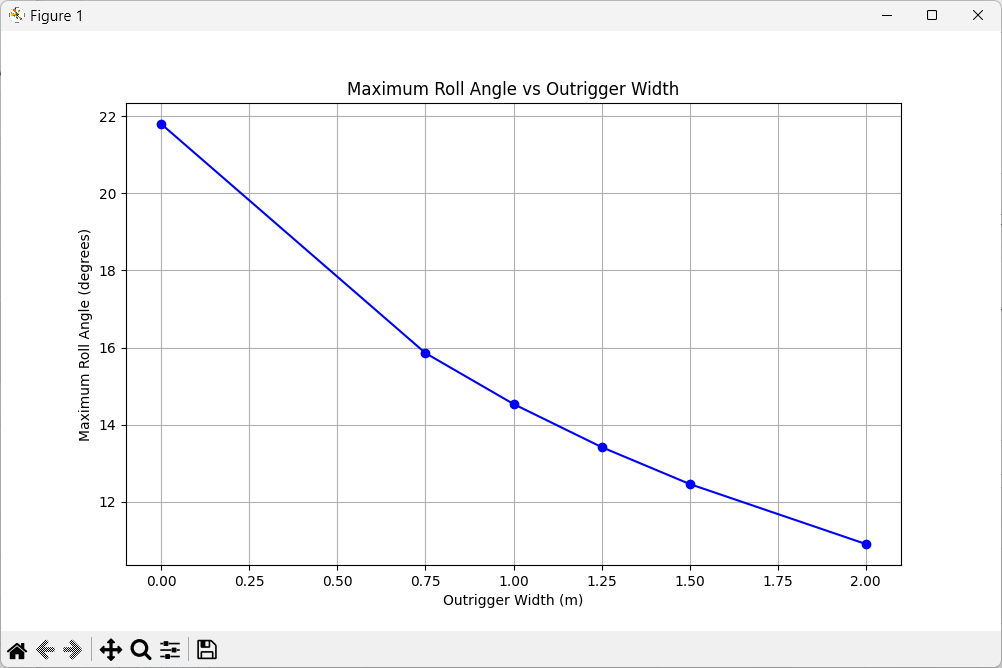
import numpy as np import matplotlib.pyplot as plt from scipy.signal import find_peaks # 파도 프로파일 생성 함수 def generate_wave_profile(time, amplitude, frequency): return amplitude * np.sin(2 * np.pi * frequency * time) # 선박 요동 각도 계산 함수 def calculate_boat_angle(wave_height, outrigger_width): base_angle = np.arctan(wave_height / 5) # 기본 각도 (아웃리거 없을 때) if outrigger_width == 0: return np.degrees(base_angle) else: return np.degrees(base_angle / (1 + outrigger_width * 0.5)) # 아웃리거 효과 # 파라미터 설정 time = np.linspace(0, 10, 1000) # 10초 동안 1000개 데이터 포인트 wave_amplitude = 2 # 파도 진폭 (미터) wave_frequency = 0.5 # 파도 주파수 (Hz) # 파도 프로파일 생성 wave_profile = generate_wave_profile(time, wave_amplitude, wave_frequency) # 아웃리거 폭 범위 설정 outrigger_widths = [0, 0.75, 1, 1.25, 1.5, 2] # 그래프 설정 plt.figure(figsize=(12, 8)) # 파도 프로파일 플롯 plt.subplot(2, 1, 1) plt.plot(time, wave_profile, label='Wave Profile') plt.title('Wave Profile') plt.xlabel('Time (s)') plt.ylabel('Wave Height (m)') plt.legend() # 선박 요동 각도 플롯 plt.subplot(2, 1, 2) for width in outrigger_widths: boat_angles = [calculate_boat_angle(h, width) for h in wave_profile] plt.plot(time, boat_angles, label=f'Outrigger Width: {width}m') plt.title('Boat Roll Angle for Different Outrigger Widths') plt.xlabel('Time (s)') plt.ylabel('Roll Angle (degrees)') plt.legend() plt.tight_layout() plt.show() # 최대 요동 각도 분석 max_angles = [] for width in outrigger_widths: boat_angles = [calculate_boat_angle(h, width) for h in wave_profile] peaks, _ = find_peaks(boat_angles) max_angle = np.mean(np.array(boat_angles)[peaks]) max_angles.append(max_angle) # 최대 요동 각도 플롯 plt.figure(figsize=(10, 6)) plt.plot(outrigger_widths, max_angles, 'bo-') plt.title('Maximum Roll Angle vs Outrigger Width') plt.xlabel('Outrigger Width (m)') plt.ylabel('Maximum Roll Angle (degrees)') plt.grid(True) plt.show() # 결과 출력 for width, max_angle in zip(outrigger_widths, max_angles): print(f"Outrigger Width: {width}m, Max Roll Angle: {max_angle:.2f} degrees")인공지능 정말 똑똑하네요.
인공지능은 아직 개발 초기단계라는거...
세상의모든계산기 님의 최근 댓글
아 그렇네요. 감사합니다. ^^ 2026 04.28 정적분 구간에 미지수가 있고, solve 를 사용할 수 없을 때 그 값을 확인하려면? https://allcalc.org/57087 `SOLVE` 기능 내에 `∫(적분)` 기호를 사용할 수 없을 때 뉴튼-랩슨법을 직접 사용하는 방법 2026 04.15 뉴턴-랩슨 적분 방정식 시각화 v1.0 body { font-family: 'Pretendard', -apple-system, BlinkMacSystemFont, "Segoe UI", Roboto, Helvetica, Arial, sans-serif; display: flex; flex-direction: column; align-items: center; background: #f8f9fa; padding: 40px 20px; margin: 0; color: #333; } .container { background: white; padding: 40px; border-radius: 20px; box-shadow: 0 15px 35px rgba(0,0,0,0.08); max-width: 900px; width: 100%; } header { border-bottom: 2px solid #f1f3f4; margin-bottom: 30px; padding-bottom: 20px; } h1 { color: #1a73e8; margin: 0 0 10px 0; font-size: 1.8em; } p.subtitle { color: #5f6368; margin: 0; font-size: 1.1em; } .equation-box { background: #f1f3f4; padding: 15px; border-radius: 10px; text-align: center; margin-bottom: 30px; font-size: 1.3em; } canvas { border: 1px solid #e0e0e0; border-radius: 12px; background: #fff; width: 100%; height: auto; display: block; } .controls { margin-top: 30px; display: flex; gap: 15px; align-items: center; justify-content: center; flex-wrap: wrap; } button { padding: 12px 25px; border: none; border-radius: 8px; background: #1a73e8; color: white; cursor: pointer; font-weight: 600; font-size: 1em; transition: all 0.2s; box-shadow: 0 2px 5px rgba(26,115,232,0.3); } button:hover { background: #1557b0; transform: translateY(-1px); box-shadow: 0 4px 8px rgba(26,115,232,0.4); } button:active { transform: translateY(0); } button.secondary { background: #5f6368; box-shadow: 0 2px 5px rgba(0,0,0,0.2); } button.secondary:hover { background: #4a4e52; } .status-badge { background: #e8f0fe; color: #1967d2; padding: 8px 15px; border-radius: 20px; font-weight: bold; font-size: 0.9em; } .explanation { margin-top: 40px; padding: 25px; background: #fff8e1; border-left: 5px solid #ffc107; border-radius: 8px; line-height: 1.8; } .explanation h3 { margin-top: 0; color: #856404; } .math-symbol { font-family: 'Times New Roman', serif; font-style: italic; font-weight: bold; color: #d93025; } .code-snippet { background: #202124; color: #e8eaed; padding: 2px 6px; border-radius: 4px; font-family: monospace; } 📊 Newton-Raphson 적분 방정식 시뮬레이터 미분적분학의 기본 정리(FTC)를 이용한 수치해석 시각화 목표 방정식: ∫₀ᴬ (2√x) dx = 20 을 만족하는 A를 찾아라! 계산 시작 (A 추적) 초기화 현재 반복: 0회 💡 시각적 동작 원리 (Newton-Raphson & FTC) Step 1 (오차 측정): 현재 A까지 쌓인 파란색 면적이 목표치(20)와 얼마나 차이나는지 계산합니다. Step 2 (FTC의 마법): 면적의 변화율(미분)은 그 지점의 그래프 높이 f(A)와 같습니다. Step 3 (보정): 다음 A = 현재 A - (면적 오차 / 현재 높이) 공식을 사용하여 A를 이동시킵니다. 결론: 오차를 현재 높이로 나누면, 오차를 메우기 위해 필요한 가로 길이(ΔA)가 나옵니다. 이 과정을 반복하면 정답에 도달합니다! const canvas = document.getElementById('graphCanvas'); const ctx = canvas.getContext('2d'); const iterText = document.getElementById('iterText'); // 수학 설정 const targetArea = 20; const f = (x) => Math.sqrt(x) * 2; // 피적분 함수 f(x) = 2√x const F = (x) => (4/3) * Math.pow(x, 1.5); // 정적분 결과 F(x) = ∫ 2√x dx = 4/3 * x^(3/2) let A = 1.5; // 초기값 let iteration = 0; let animating = false; // 그래프 드로잉 설정 const scale = 50; const offsetX = 60; const offsetY = 380; function drawGrid() { ctx.strokeStyle = '#f1f3f4'; ctx.lineWidth = 1; ctx.beginPath(); for(let i=0; i 2026 04.11 참값 : A = ±2√5 근사값 : A≈±4.472135954999579392818347 2026 04.10 fx-570 ES 입력 결과 초기값 입력 반복 수식 입력 반복 결과 2026 04.10