- 세상의 모든 계산기 수학, 과학, 공학 이야기 수학 ()
직교 좌표계 vs 극좌표계의 시각적 비교
-

- 2024.10.30 - 15:37 2024.10.27 - 18:21 1625 4
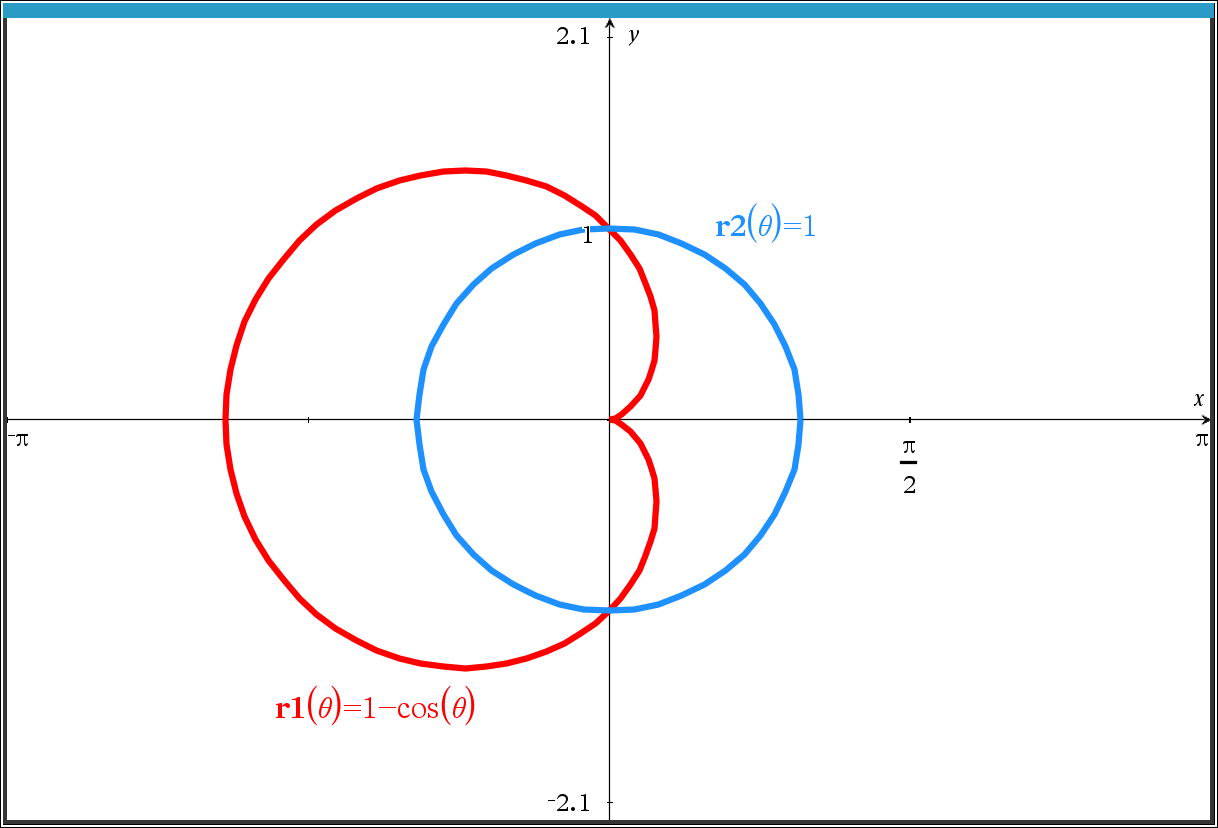
1. 두 개의 극좌표 함수가 있습니다.
2. 직교좌표계에서 표시.
Rectangular Coordinate = 카르테시안 좌표계 Cartesian coordinate system
각 축이 서로 수직(직각)으로 만남.
각 축의 값이 커지거나 작아지는 것은 일직선 위에서 발생
3. 극좌표계에서 표시
Polar Coordinate
import numpy as np
import matplotlib.pyplot as plt
# t의 범위 설정 (0부터 2π까지)
t = np.linspace(0, 2 * np.pi, 100)
# 극좌표 함수 정의
r1 = np.ones_like(t) # r(t) = 1
r2 = 1 - np.cos(t) # r(t) = 1 - cos(t)
# 극좌표 그래프 그리기
fig = plt.figure(figsize=(12, 6))
# r(t) = 1 그래프
ax1 = fig.add_subplot(121, projection='polar')
ax1.plot(t, r1, label='r(t) = 1', color='b')
ax1.fill(t, r1, color='blue', alpha=0.2) # 그래프 아래 영역 채우기
ax1.set_title('Polar Plot of r(t) = 1', va='bottom')
ax1.set_ylim(0, 2) # 반지름 범위 설정
ax1.legend()
# r(t) = 1 - cos(t) 그래프
ax2 = fig.add_subplot(122, projection='polar')
ax2.plot(t, r2, label='r(t) = 1 - cos(t)', color='r')
ax2.fill(t, r2, color='red', alpha=0.2) # 그래프 아래 영역 채우기
ax2.set_title('Polar Plot of r(t) = 1 - cos(t)', va='bottom')
ax2.set_ylim(0, 2) # 반지름 범위 설정
ax2.legend()
# 그래프 보여주기
plt.tight_layout()
plt.show()
극좌표계의 구조
-
각도 축: 극좌표계에서tt 축(각도 축)은 원점을 기준으로 하는 방향을 나타냅니다. 각도는 일반적으로 반시계 방향으로 측정되며, 0에서 2π까지 변화합니다.
-
반지름 축: r 축(반지름)은 원점으로부터의 거리로, 특정 각도에 따라 뻗어 있습니다. 반지름은 원점에서 시작하여 외부로 나아가며, 주어진 각도 t에서의 반지름 r 값에 따라 점이 위치하게 됩니다.
-
동심원: 극좌표계는 다양한 반지름에 대해 중심이 같은 원을 그리는 "동심원" 형태로 되어 있습니다. 즉, 반지름 r의 값에 따라 같은 각도 t에서 원의 크기가 결정됩니다.
4. 비교
- 직교좌표계에서는 x축과 y축이 수직으로 만나며, 각 축이 서로의 기준을 이루는 데 반해,
- 극좌표계에서는 각도와 반지름이 서로 독립적인 성질을 가지며, 각도는 방향을, 반지름은 거리를 나타내게 됩니다.
-
25
댓글4
-
세상의모든계산기
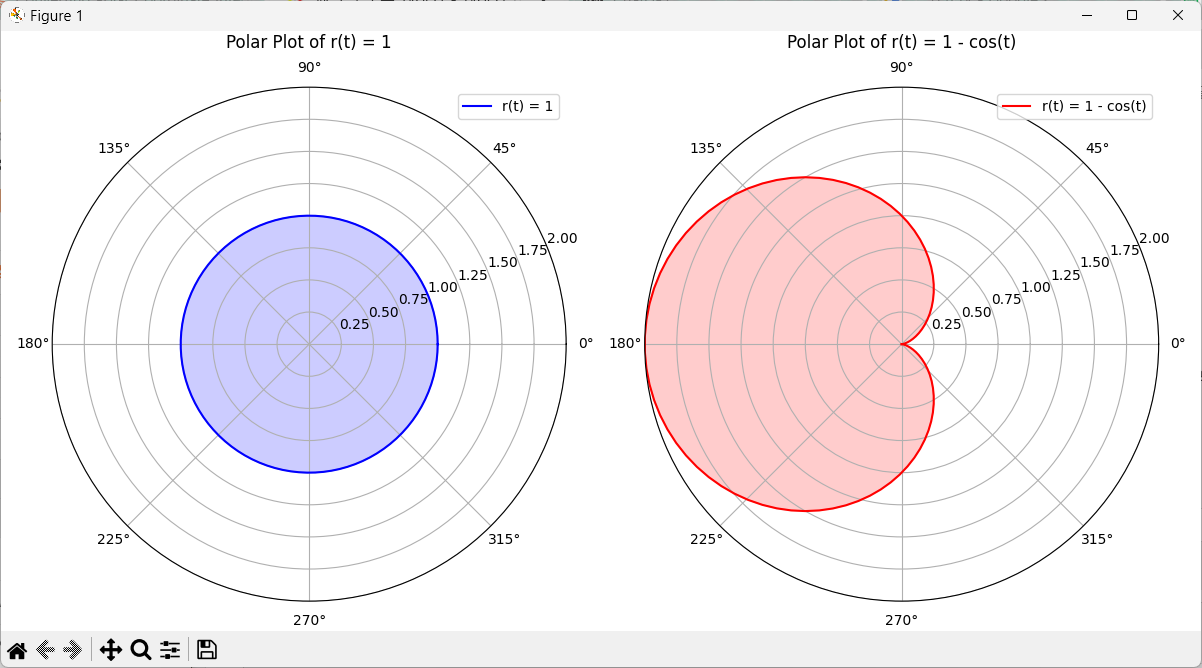
극좌표계에서의 면적 요소 \(dA\)
1. 부채꼴 형상:
- 극좌표계에서 \(r\)와 \(\theta\)의 변화에 따라 만들어지는 면적 요소는 부채꼴의 형태를 가집니다. 그러나 이 부채꼴은 작아질수록 사각형에 가까워집니다.2. 사각형 근사:
- 부채꼴의 끝부분이 작아질 때, 이를 사각형으로 근사할 수 있습니다. 이때 사각형의 한 변은 \(dr\) (거리에 해당), 다른 변은 \(r \, d\theta\) (각도 변화에 따른 아크 길이에 해당)입니다.
3. 면적 계산:
- 따라서 미소 면적 요소는 다음과 같이 표현할 수 있습니다:
\[
dA = r \, dr \, d\theta
\]
- 여기서 \(r \, d\theta\)는 사각형의 한 변의 길이를 나타내고, \(dr\)는 나머지 변의 길이를 나타냅니다.
- 즉, 사각형의 면적은 다음과 같이 계산할 수 있습니다:
\[
dA \approx (r \, d\theta) \cdot (dr) = r \, dr \, d\theta
\]4. 순서 변경:
- 이 면적 요소는 \(dA = r \, dr \, d\theta\)로 쓸 수 있으며, 순서를 바꿔서도 쓸 수 있습니다. 예를 들어 \(dA = r \, dr \, d\theta\)는 \(dA = dr \cdot r \, d\theta\)와 같이 쓸 수 있습니다. 이는 곱셈의 교환 법칙에 따라 가능하며, 적분할 때에도 상관없이 사용됩니다. -
세상의모든계산기
극좌표 함수의 형태로 나타나는 이중적분
극좌표 함수에서 \(dA = r \, dr \, d\theta\) 형태로 나타낼 수 있는 이중적분 \(\int \int f(r, \theta) \, r \, dr \, d\theta\)는 면적을 계산하는 방식입니다.
이 계산식에서 \(r\)과 \(\theta\)의 변화에 따른 미소 면적의 총합으로 이해할 수 있습니다.
이중적분의 의미
1. 미소 면적의 총합:
- 극좌표계에서 \(dA\)는 미소 면적 요소를 나타냅니다. \(r\)이 변화하고, \(\theta\)도 변화할 때, 각 미소 면적 \(dA\)를 모두 합산하여 전체 면적을 구하는 것이 이중적분의 목적입니다.
- 즉, \(\int_0^{\theta_{\text{max}}} \int_0^{r_{\text{max}}} f(r, \theta) \, r \, dr \, d\theta\)와 같이 표현되는 이중적분은 각 \(r\)에 대한 함수 값 \(f(r, \theta)\)와 면적 요소 \(r \, dr\)를 곱한 후, 이를 \(\theta\)에 대해 적분하여 총 면적을 구하는 과정입니다.2. 변화에 따른 적분:
- \(r\)와 \(\theta\)가 각각의 구간에서 변화할 때, 그 변화에 따른 미소 면적을 구해 적분하는 것이므로, \(t\)의 총 변화(여기서는 \(\theta\)로 표현됨)에 따른 미소 면적의 총합으로 볼 수 있습니다.결론
결국, 극좌표에서의 이중적분은 각 점의 미소 면적 \(dA\)를 합산하여 전체 면적을 구하는 과정입니다.
이때 \(r \, dr \, d\theta\)는 면적 요소로 작용하며, 이는 각각의 \(r\)과 \(\theta\)의 변화에 따른 총 면적을 반영합니다.
따라서 \(\int \int f(r, \theta) \, r \, dr \, d\theta\)는 미소 면적의 총합으로 볼 수 있습니다. 잘 이해하셨습니다!
-
1
세상의모든계산기
이중적분 \(\int_0^{2\pi} \int_0^{\sin(t)} \sqrt{1 - r^2} \cdot r \, dr \, dt\)에서 \(t\)의 변화에 따라 그래프의 변화를 연속적으로 보여주면
import numpy as np import matplotlib.pyplot as plt from matplotlib.animation import FuncAnimation # 설정 t_values = np.linspace(0, 2 * np.pi, 100) # t의 변화 범위 # 그래프 초기화 fig, ax = plt.subplots(figsize=(8, 8)) ax.set_xlim(-1.5, 1.5) ax.set_ylim(-1.5, 1.5) ax.set_aspect('equal') ax.set_title('Area under the curve for varying $t$') ax.set_xlabel('$x$') ax.set_ylabel('$y$') # 그래프에 사용할 점과 면적 표시 line_r, = ax.plot([], [], color='blue', label='$r(t) = \sin(t)$') ax.legend() # 면적 다각형 리스트 area_patches = [] total_area = 0 # 총 면적 초기화 area_text = ax.text(-1.4, 1.2, f'Total Area: {total_area:.2f}', fontsize=12) # 애니메이션 업데이트 함수 def update(frame): global total_area # 총 면적을 전역 변수로 설정 t = t_values[frame] r = np.linspace(0, np.sin(t), 100) # r 값 생성 x = r * np.cos(t) # x 좌표 y = r * np.sin(t) # y 좌표 # 면적을 나타내는 다각형 생성 area_patch = plt.Polygon(np.column_stack((x, y)), closed=True, color='lightblue', alpha=0.5) ax.add_patch(area_patch) # 다각형 추가 area_patches.append(area_patch) # 면적 목록에 추가 # 면적 계산 (부채꼴 면적 계산) segment_area = 0.5 * (np.sin(t) ** 2) * t # t에 따른 면적 total_area += segment_area # 총 면적 업데이트 # 선 업데이트 line_r.set_data(np.array([0, x[-1]]), np.array([0, y[-1]])) # 면적 합계 텍스트 업데이트 area_text.set_text(f'Total Area: {total_area:.2f}') return area_patches, line_r, area_text # 애니메이션 생성 ani = FuncAnimation(fig, update, frames=len(t_values), blit=False, repeat=False) # 진행 표시줄 추가 progress_ax = fig.add_axes([0.15, 0.1, 0.7, 0.05]) # 위치 조정 progress_bar = plt.barh([0], [0], color='gray', height=0.1) # 진행 표시줄 progress_ax.set_xlim(0, len(t_values)) progress_ax.set_ylim(-0.5, 0.5) progress_ax.axis('off') # 축 숨기기 # 진행 표시줄 레이블 추가 start_label = progress_ax.text(-1, 0, 'Start: $t=0$', fontsize=10, ha='center') end_label = progress_ax.text(len(t_values)+1, 0, 'End: $t=2\pi$', fontsize=10, ha='center') # 애니메이션 프레임 업데이트 def update_progress(frame): progress_bar[0].set_width(frame) # 진행 표시줄 업데이트 return progress_bar # 진행 표시줄 애니메이션 ani_progress = FuncAnimation(fig, update_progress, frames=len(t_values), blit=False, repeat=False) plt.show()
세상의모든계산기 님의 최근 댓글
- claude AI는 l-c*r^2 을 1-c*r^2 으로 잘못 읽고 표시하고 있습니다. - TI-nspire CAS 계산기에 l-c*r^2 ≥0 을 조건에 추가해 계산해 보아도 결과는 바뀌지 않습니다. 2026 07.20 ⚠️ 경고가 바로 두 번째 방법이 "성공"한 이유와 정확히 연결되어 있습니다. 경고의 의미 "Domain of the result might be larger than the domain of the input"는 CAS가 절댓값(모듈러스)을 계산하는 과정에서 원래 식보다 정의역이 더 넓은 형태로 단순화했다는 뜻입니다. 구체적으로 이 계산은 내부적으로 대략 이런 과정을 거칩니다. $$\left|\frac{er}{e\cdot r}\right| = \sqrt{\left(\frac{er}{e\cdot r}\right)\cdot\overline{\left(\frac{er}{e\cdot r}\right)}}$$ 즉 원래 식(복소수)과 그 켤레복소수를 곱해서 실수부·허수부 제곱합을 만들고, 거기에 다시 제곱근을 씌우는 과정입니다. 이 과정에서 √(x²) → x 또는 √a·√b → √(ab) 같은 규칙들이 쓰이는데, 이런 규칙들은 x가 실수이고 0 이상일 때만 엄밀하게 성립합니다. CAS는 이 조건들을 일일이 다 추적하지 않고 넘어가면서, 원래는 (e≠0, r+l·ω·i ≠ 0 등) 복소수 특유의 좁은 정의역을 가진 식을, r, l, ω가 어떤 실수여도(부호 무관하게) 정의되는 1/√(r²+l²·ω²)라는 더 넓은 정의역의 식으로 바꿔버린 것입니다. CAS는 이 손실을 감지하고 경고를 띄운 것입니다. 이게 왜 조건 대입 성공과 연결되는가 정리하면, 이 경고는 사실상 이런 뜻입니다. "나는 이 결과를 만들면서 원래 식이 가지고 있던 정의역 제약 정보(부호 조건, i 관련 조건 등)를 이미 버렸다." 바로 이 "정의역 정보를 버린" 상태가 이후 con_1 대입을 매끄럽게 만드는 원인입니다. 첫 번째 시도에서는 i가 살아있는 원래 식에 조건을 대입했기 때문에, CAS가 √(1-c·r²)이 실수인지(정의역 조건: 1-c·r² ≥ 0) 계속 추적하려고 했고, 그 정보가 con에 없어서 더 이상 정리를 못 하고 멈췄습니다. 두 번째 시도에서는 절댓값 계산 단계에서 이미 그런 세밀한 정의역 추적을 CAS 스스로 포기(단순화)했기 때문에, 이후 ω에 무리식을 대입해도 "이게 실수가 맞나?" 하는 검증 절차 없이 그냥 대수적으로 치환·정리해 버립니다. 그래서 깔끔하게 √c/√l이 나온 겁니다. 한 줄 요약 절댓값 계산 시 뜬 "정의역이 넓어졌을 수 있다"는 경고는, CAS가 그 순간에 원래 식의 엄밀한 조건(정의역)을 놓쳤다는 신호이고, 바로 그 "조건을 놓친 상태"이기 때문에 뒤에 이어지는 조건식 대입이 막힘없이 진행된 것입니다. 다만 그 대가로, 결과인 1/√(r²+l²·ω²)이나 최종 √c/√l이 원래 회로 조건(i≠0이 되는 경계, 분모가 0이 되는 경우 등)에서는 엄밀히 성립하지 않을 수 있다는 점은 감안하셔야 합니다. 실제 물리적으로는 r, l, c > 0이고 결과도 물리적으로 타당한 형태라 문제없어 보이지만, 수학적 엄밀성 측면에서는 "정의역이 넓어진 근사적 결과"라는 꼬리표가 붙어있는 셈입니다. 2026 07.20 Claude AI 답변 TI-Nspire CAS의 | (such that / 조건대입) 연산자는 대입 시점의 수식 형태를 그대로 두고 기호만 치환하는 연산입니다. 대입 후에 처음부터 다시 "실수부/허수부 분리, 유리화" 같은 재간소화를 자동으로 수행하지 않습니다. 이 차이가 지금 보신 결과 차이의 핵심입니다. 첫 번째 경우 (|er/(e·r)| | con_1 and con → 실패) 이 시점의 식은 아직 r + l·ω·i 형태의 복소수 그대로입니다 (i가 살아있음). 여기에 con_1: ω = √(1-c·r²)/(√c·l)을 대입하면, 분모 안에 i · √(1-c·r²) 라는 항이 새로 생깁니다. 문제는 CAS가 √(1-c·r²)이 실수인지(즉 1-c·r² ≥ 0인지) 판단할 근거가 없다는 겁니다. 저장해 두신 con 조건은 c>0, l>0, r>0뿐이고, 1-c·r²≥0이라는 조건은 포함되어 있지 않습니다. 그래서 CAS는 i와 이 무리식을 더 정리(유리화, 실수부·허수부 재결합)하지 못하고 있는 그대로 남겨둡니다. 결과에 여전히 i가 보이는 이유입니다. 두 번째 경우 (결과값 1/√(r²+l²·ω²)에 대입 → 성공) |er/(e·r)| (절댓값/모듈러스) 연산은 그 자체로 이미 "복소수 → 실수" 변환을 완료한 결과입니다. 즉 1/√(r²+l²·ω²)에는 더 이상 i가 없고, 순수하게 r, l, ω로만 이루어진 실수식입니다. 이 식에 ω = con_1을 대입하는 것은 그냥 실수 대수식에 실수 대입하는 것이므로, i와 무리식이 뒤엉키는 문제 자체가 발생하지 않습니다. 그래서 바로 깔끔하게 √c/√l로 정리됩니다. 정리하면 절댓값(모듈러스) 계산은 "이 값들이 실수다"라는 가정을 이미 내부적으로 써서 i를 제거하는 연산입니다. 그 연산을 조건 대입 이전에 해두면, 이후 대입은 단순 실수 대입이라 문제없이 정리됩니다. 반대로 i가 남아있는 식에 무리식을 포함한 조건을 먼저 대입하면, 그 무리식의 실수성/부호에 대한 가정이 없어서 CAS가 i를 소거하는 재간소화를 못 하고 멈춰버립니다. 실용적 팁: 복소식에 조건을 대입해야 할 때는 가능하면 절댓값·실수화(유리화) 등을 먼저 끝내서 i를 없앤 뒤 조건을 대입하거나, 대입 후 결과에 다시 simplify/expand/combine 같은 명령을 한 번 더 걸어주면 (필요한 도메인 조건과 함께) 정리가 되는 경우가 많습니다. 2026 07.19 저도 어림잡아 추측할 뿐이지 정확한 이유를 알지는 못합니다. 질문하신 사진을 그대로 (Gemini 3.5 Flash / ChatGPT / Claude Sonnet 5) AI에 넣어 보니 claude AI 가 제일 합리적인 답변을 주어서 이를 붙여 넣습니다. 2026 07.19 아 그렇네요. 감사합니다. ^^ 2026 04.28